Project video: https://youtu.be/ykDu9VVfOIY
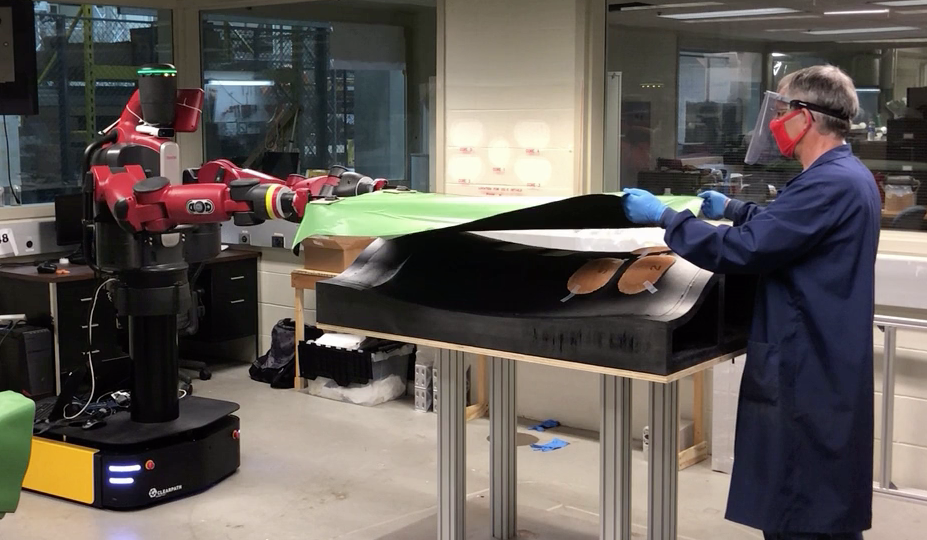
The manufacture of composite aerospace structural components often involves manual layup of pre-impregnated composite sheets (‘prepreg plies’) by expert technicians (Fig. 1). Each produced compositepart consists of plies with specific orientation and geometry requiring accurate placement, with tolerancerequirements on the order of magnitude of 10-2 of an inch. Conforming each ply to the layup mandrel(‘LM’) topology requires careful attention and human dexterity to avoid process defects such as wrinklesor fiber misalignment. Lay-up operators learn how to complete these tasks from experience and touchcraftsmanship passed along through “tribal knowledge”, making hand layup strongly dependent on theskills, experience, and dexterity of the human operator – and hence, prone to variability. It also facesother challenges by being time-intensive and creating ergonomic issues for the lay-up operators.
This project focuses on human-robot teaming for handling, placing, and conforming tasks. It combines control technologies and task planning, allowing a human-robot team to better manipulate large composite sheets. The process involves lifting, transporting, and completing the conforming process with the human-robot team interacting in an intuitive way to accomplish complex manufacturing tasks. The technology advancements generated from this project are key enablers for collaborative human-robot, or “cobotic”, applications with complex task sets.Manufacturing composite aerospace structural components often involves manual layup of pre-impregnated composite sheets by expert technicians. Each produced composite part consists of plies with specific orientation and geometry requiring accurate placement. Conforming each ply to the layup mandrel topology requires careful attention and human dexterity to avoid process defects such as wrinkles or fiber misalignment. Hand layup is strongly dependent on the skills, experience, and dexterity of the human operator – and hence, prone to variability. The desire to automate a hand layup process is motivated to reduce and prevent perpetuating high process costs due to labor, process variability linked to human factors, and through-put bottlenecks. Existing automation processes, including automated fiber or tape placement in aerospace and liquid or compression molding in the automotive sector, cannot affordably accommodate some complex structural geometries, so hand layup persists.The human-robot collaboration progresses through levels of autonomy. The first step is for human and robot to collaboratively transport a large deformable composite fabric with robot following the human cue while avoiding any unintended contacts with the environment. The second step is for the robot to learn from the human layup operation and further optimize the operation based on the mold geometry and fabric material properties. The last step is for human to supervise the semi-autonomous layup operation,and be able to pause, intervene, and then continue at any part of the operation. Often in manual fabrication environments, such as composite layup, operators learn from completing difficult tasks and learned expertise and touch craftsmanship are passed along through “tribal knowledge.” Adding robotics to these operations presents an opportunity to capture this empirical process information formally.This collaborative robot (‘cobot’) arrangement decreases process deviations, enables flexible production rates, and drives improvements in control of fiber draping and fiber orientation. Precision handling and processing of compliant materials, such as composite prepreg sheets, are applicable in a wide range of industries including wind energy, automotive and transportation, and textile manufacturing. Automated handling of soft materials also arise in other industries, such as custom garment manufacturing.
Teaming for Composite Ply Lay-up and Conforming,
This project focuses on human-robot teaming for handling, placing, and conforming tasks. It combines control technologies and task planning, allowing a human-robot team to better manipulate large composite sheets. The process involves lifting, transporting, and completing the conforming process with the human-robot team interacting in an intuitive way to accomplish complex manufacturing tasks. The technology advancements generated from this project are key enablers for collaborative human-robot, or “cobotic”, applications with complex task sets.Manufacturing composite aerospace structural components often involves manual layup of pre-impregnated composite sheets by expert technicians. Each produced composite part consists of plies with specific orientation and geometry requiring accurate placement. Conforming each ply to the layup mandrel topology requires careful attention and human dexterity to avoid process defects such as wrinkles or fiber misalignment. Hand layup is strongly dependent on the skills, experience, and dexterity of the human operator – and hence, prone to variability. The desire to automate a hand layup process is motivated to reduce and prevent perpetuating high process costs due to labor, process variability linked to human factors, and through-put bottlenecks. Existing automation processes, including automated fiber or tape placement in aerospace and liquid or compression molding in the automotive sector, cannot affordably accommodate some complex structural geometries, so hand layup persists.The human-robot collaboration progresses through levels of autonomy. The first step is for human and robot to collaboratively transport a large deformable composite fabric with robot following the human cue while avoiding any unintended contacts with the environment. The second step is for the robot to learn from the human layup operation and further optimize the operation based on the mold geometry and fabric material properties. The last step is for human to supervise the semi-autonomous layup operation,and be able to pause, intervene, and then continue at any part of the operation. Often in manual fabrication environments, such as composite layup, operators learn from completing difficult tasks and learned expertise and touch craftsmanship are passed along through “tribal knowledge.” Adding robotics to these operations presents an opportunity to capture this empirical process information formally.This collaborative robot (‘cobot’) arrangement decreases process deviations, enables flexible production rates, and drives improvements in control of fiber draping and fiber orientation. Precision handling and processing of compliant materials, such as composite prepreg sheets, are applicable in a wide range of industries including wind energy, automotive and transportation, and textile manufacturing. Automated handling of soft materials also arise in other industries, such as custom garment manufacturing.