John T. Wen Research (Connected Human and Physical Systems: CHaPS)
Connected Human and Physical Systems (CHaPS)
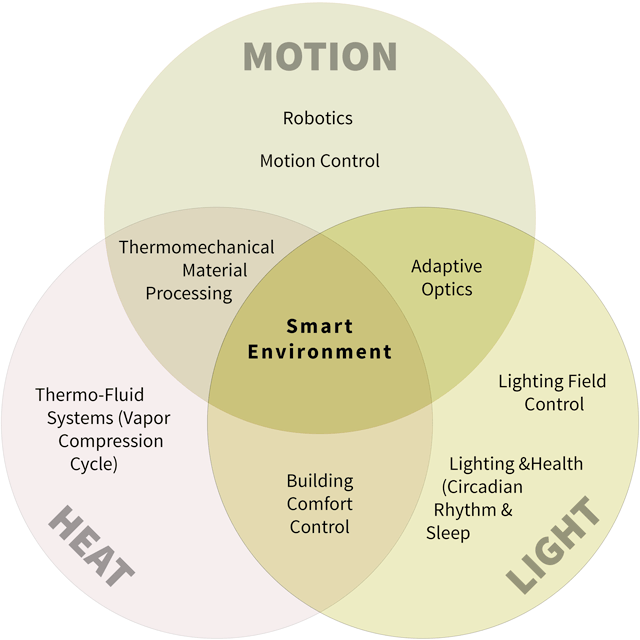
Motion, Heat, and Light: Power of Control
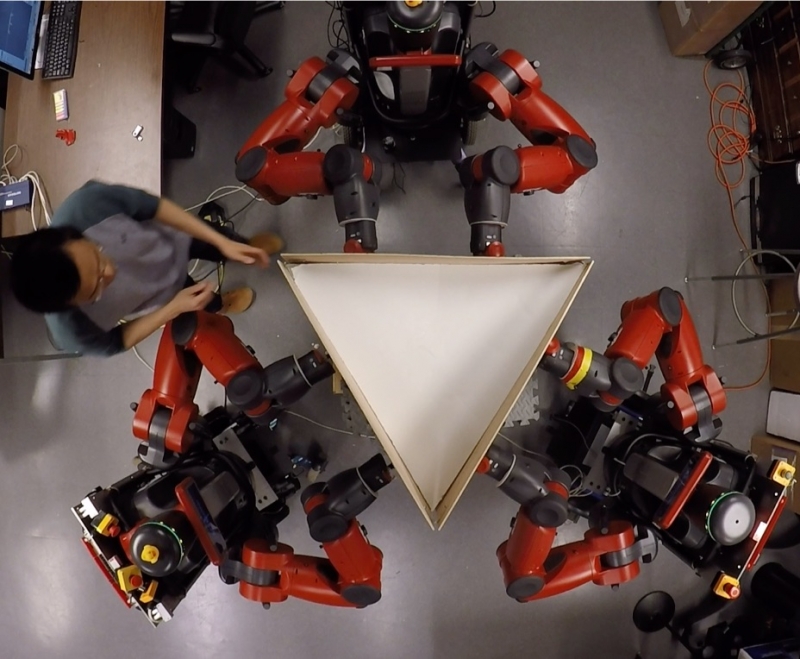
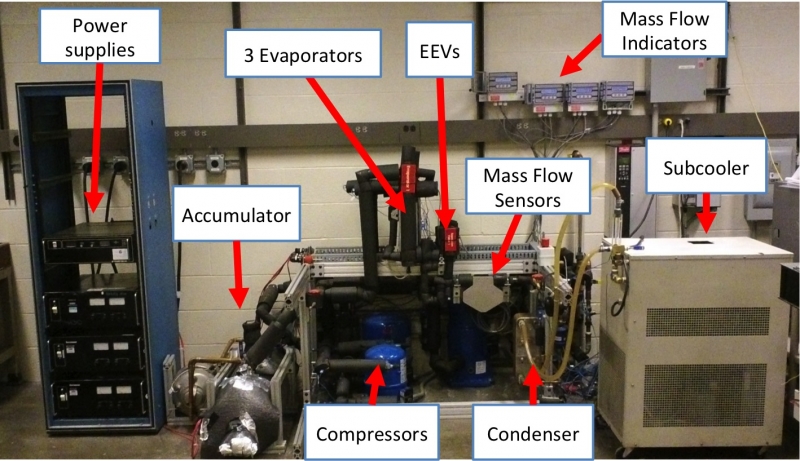
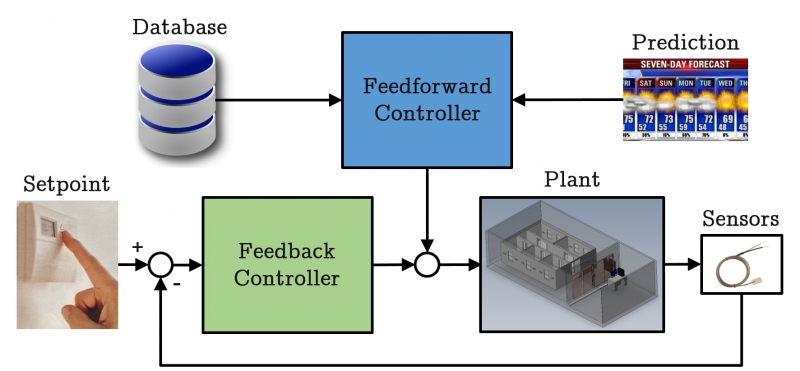
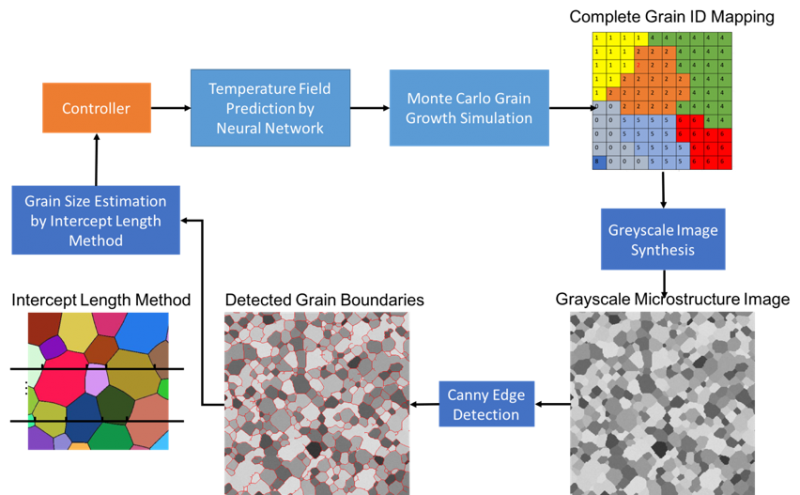
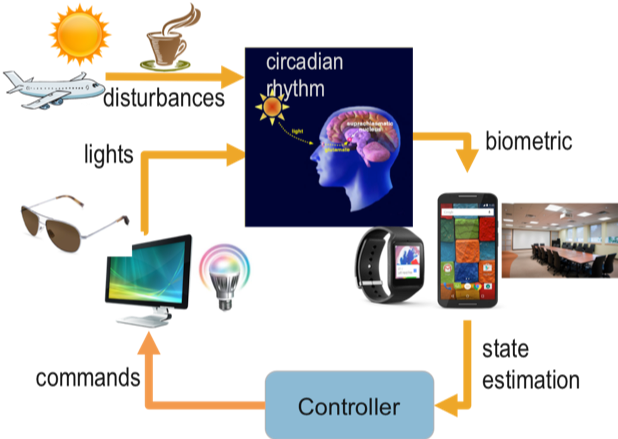
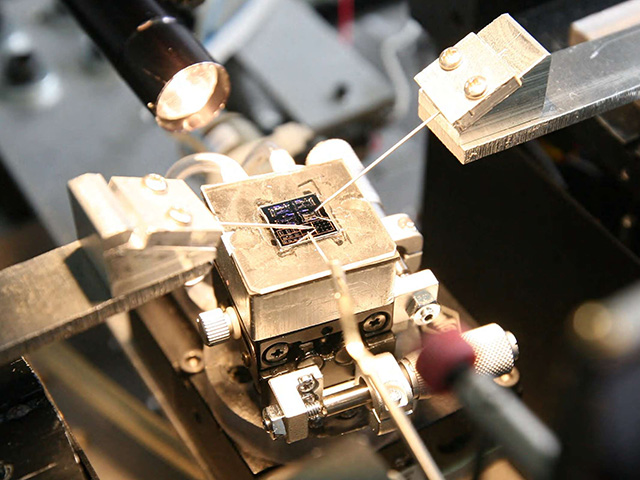
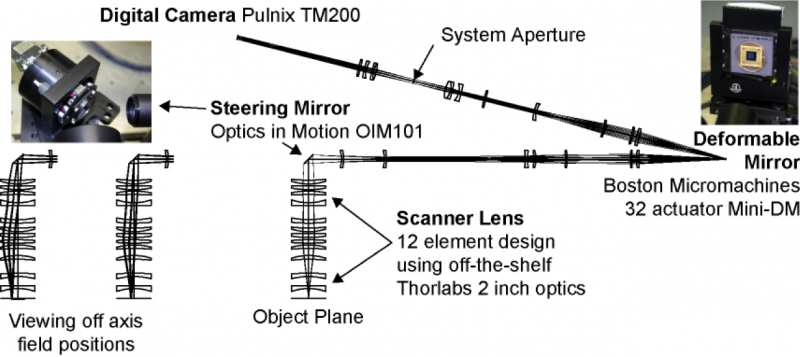
John Wen’s research is in the area of control theory and applications, broadly applied to connected human and physical systems such as assistive robotics, human-robot collaboration, and building comfort system control. John is particularly interested in hard problems that lie at the intersection of multiple disciplines. These problems are frequently characterized by complex, nonlinear, and imprecise models and multiple design objectives. John has drawn extensively on the passivity theory – an intuitive and powerful control design tool due to its natural connection to the Lyapunov method and its applicability to broad classes of dynamical systems. For performance and optimality, other system-theoretic tools are applied as needed, e.g., model identification, model reduction, multi-objective optimization, optimal control, image and signal processing. The numerous control applications that John has addressed broadly fit under motion, heat, and light, and their interactions. Motion research involves precision motion control (high speed scanning and motion planning in electronic manufacturing) and robotics (multi-robot cooperation, assistive robot, robotic satellite servicing, industrial robots in manufacturing). The focus for heat related research has been on thermo-fluid systems (two-phase heat transfer, vapor compression cycle, critical heat flux, thermal and flow instabilities) and building thermal management (temperature and humidity with human feedback and energy minimization). For light, the focus is in light-based circadian rhythm and sleep control (e.g., for shift workers, international and space travels, military personnel) and light field control using tunable light sources. In the intersection of motion and heat, John has studied thermal-compensation in precision motion systems, and more recently, thermo-mechanical processing of metal alloys (e.g., Ti6Al4V), combining modeling (Monte Carlo, Phase Field), imaging (SEM), and feedforward/feedback control. In the intersection of motion and light, his work has involved adaptive optics (in large field microscopy), beam steering (for laser electronic manufacturing), and blur-based estimation. In the intersection of heat and light, his interest is in the distributed building control, including both thermal and visual environments. The overarching theme that encompass all these applications is smart environment, including living environment, commercial environment, and manufacturing environment.