




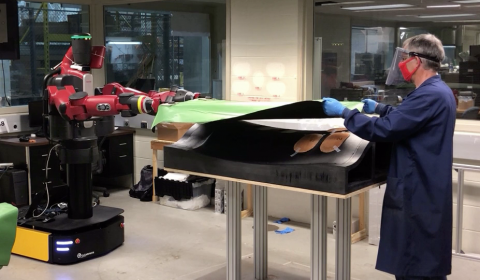
This project focuses on human-robot teaming for handling, placing, and conforming tasks. It combines control technologies and task planning, allowing a human-robot team to better manipulate large composite sheets. The process involves lifting, transporting, and completing the conforming process with the human-robot team interacting in an intuitive way to accomplish complex manufacturing tasks.
Completed Projects

In this project we developed a robotic system with an electroadhesion robot gripper containing actuated pins to alleviate human operators from performing these repeated and laborious tasks in an uncomfortable manufacturing environment. This robotic system can reliably pick-up fabric pieces, place them without wrinkles, align them using machine vision, and feed the combined bundle through the conveyor belt into the fusing machine.
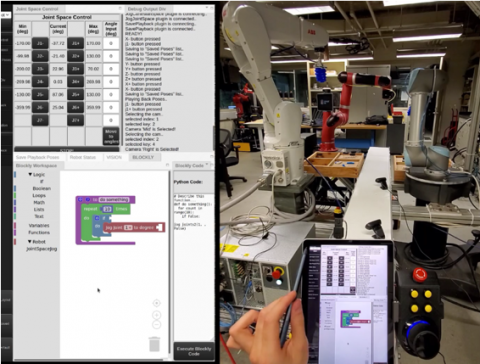
Teach pendant is the most common method to operate, control, and program industrial robots today. Despite its prevalence, current teach pendants for industrial robots are vendor specific and do not usually work with additional sensor inputs such as machine vision and force/torque sensors. There are now widely available open-source robotics software performing complex tasks, ranging from motion planning to sensor guided motion. Unfortunately, these capabilities are not readily incorporated into teach pendant operations, unless the robot vendor chooses to take the initiative.
This project aims to bridge a major gap in the current state of industrial robots: easy, rapid, and secure integration of robots, sensors, peripherals, and simulation software from multiple vendors and platforms. Our approach is based on Robot Raconteur (RR) which is an advanced augmented object-oriented middleware technology specifically designed to provide true plug-and-play interoperability capabilities for automation/robotics systems. The objective of this project is to increase the RR Technology Readiness Level to bring it from research environment to industrial usage.
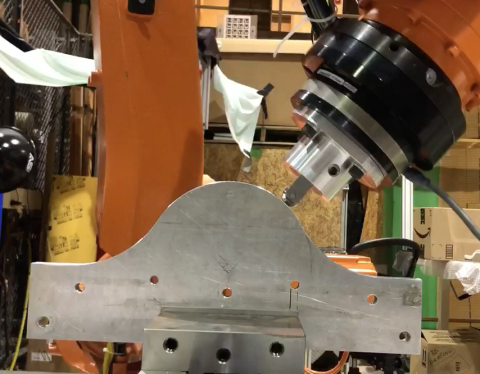
Surface treatment processes, including burnishing, deep rolling, shot peening, laser shock peening, and ultrasonic peening are commonly utilized to improve performance of a wide variety of commercial and aerospace products. Of all these methods, the deep rolling process is of interest because it can be customized according to part geometry and the required compressive residual stress profile that will enhance part fatigue life. Due to the system rigidity, conventional machining/CNC platforms are utilized in current practice. The CNC systems are typically expensive with low throughput.

This project is focused on the development of an intelligent control system to manage energy consumption of buildings by actively incorporating human mediation in this process. The unique aspect of this project includes mechanisms by which multiple tenants of a commercial building can participate in the energy management process and allow the various control and actuation functions to efficiently meet their collective needs. The goal is to develop a blueprint for a more sustainable design of buildings. In addition to the significant impact on energy efficiency and sufficiency of next-generation buildings, the techniques being developed here also have transformative impact on sustainability research and sustainable technologies as a whole.

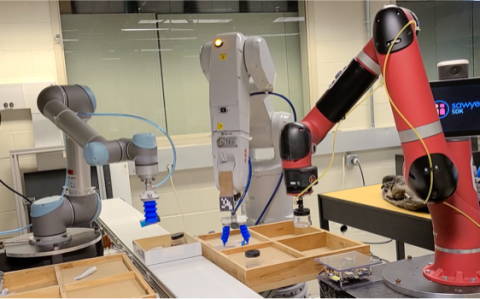
This project will develop an operator-guided semi-automatic assembly process using industrial robots integrated with multiple sensors. The goal of the project will be to improve manufacturing productivity by enhancing the operator’s capabilities though advanced robotics, and appropriately applying the technologies that capitalize on the strengths of the robotics (e.g. precise manipulation) and the operator (e.g. decision-making).
")
This project will develop effective robotic assistance for individuals with C4-C7 SCI for activities of daily living (ADL) such as house work or food preparation. The inability to perform ADL are major reasons that individuals with SCI and other disabilities move from living independently to intermediate care residences, because dedicated human help is expensive.

This research will develop the understanding and methods necessary to generate and interpret experimental and simulated descriptions of microstructural transformation during thermo-mechanical processing, and then to apply the necessary control of processing conditions to generate a prescribed microstructure in the alloy Ti-6%Al-4%.

There is a significant need for efficient thermal management for cooling photonic devices such as LED, laser diodes, GaN devices such as High Electron Mobility Transistors, and high performance integrated circuits. High temperatures can degrade performance and efficiency, possibly leading to irreversible damages. This research considers two-phase cooling using microchannel evaporators in a vapor compression cycle. The goal is to design and fabricate microchannel evaporators and develop modeling, optimization, and control strategies for efficient and robust operations.