Advanced Control for Robotics Surface Treatment
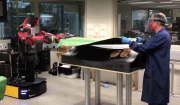
Surface treatment processes, including burnishing, deep rolling, shot peening, laser shock peening, and ultrasonic peening are commonly utilized to improve performance of a wide variety of commercial and aerospace products. Of all these methods, the deep rolling process is of interest because it can be customized according to part geometry and the required compressive residual stress profile that will enhance part fatigue life. Due to the system rigidity, conventional machining/CNC platforms are utilized in current practice.